
今までたくさんの事を学習してきましたが、全てこの回転行列に繋がっています。
回転行列とは以下の事です。
回転行列$R(\theta)$は以下である:
$ R(\theta) = \begin{bmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{bmatrix} $
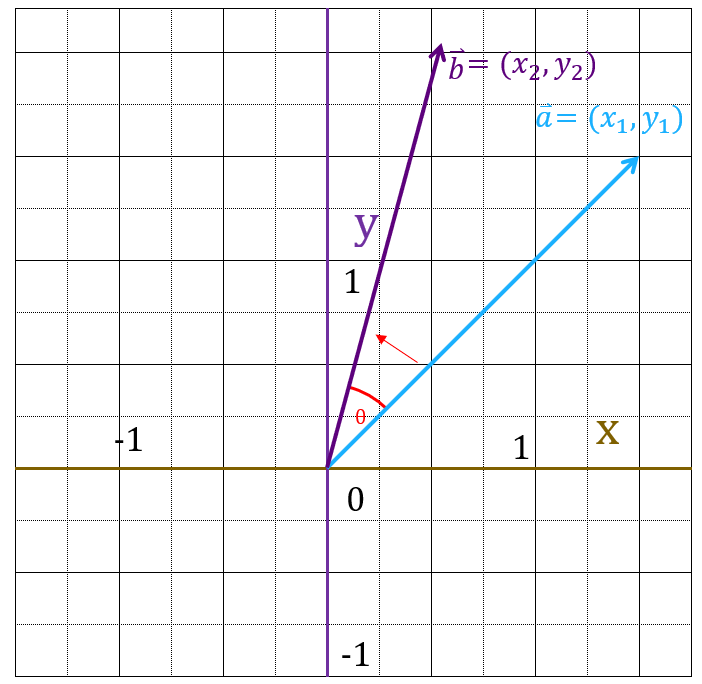
回転対象のベクトルを$\vec{a} = (x_1,\; y_1)$とする
回転行列とベクトルに以下の掛け算をした結果である$\vec{b}$は、$\vec{a}$を$θ$回転したベクトルである
$ R(\theta)\times\vec{a} = \begin{bmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{bmatrix} \times \begin{bmatrix} x_1 \\ y_1 \end{bmatrix} = \vec{b} $
まず、x軸とベクトル$\vec{a}$の間の角度を$θ_1$とします。
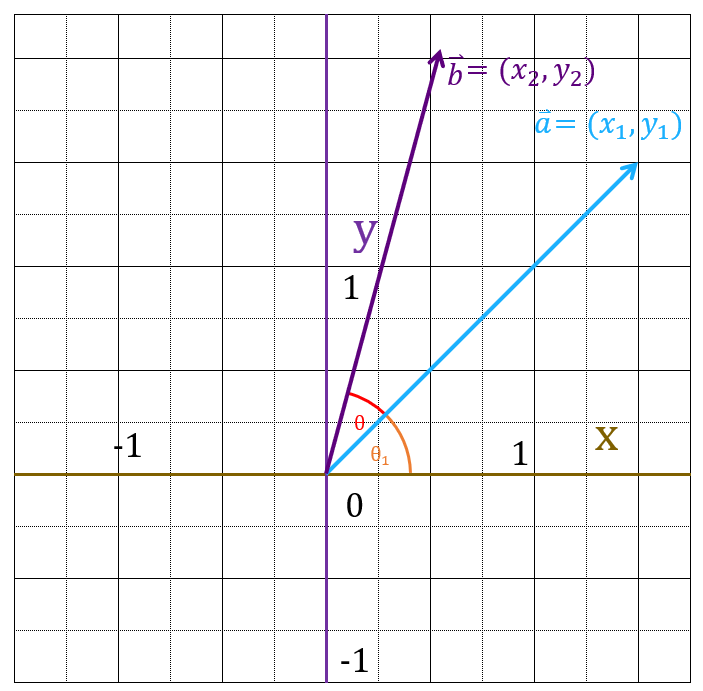
もし、本当に、$\vec{b}$が、$\vec{a}$をθ回転させたベクトルであるならば、
$\vec{b}$を三角関数表示すると、以下になっているはずです。
$\vec{b}= (|\vec{a}|\times cos(\theta_1 + \theta),\; |\vec{a}|\times sin(\theta_1 + \theta)) $
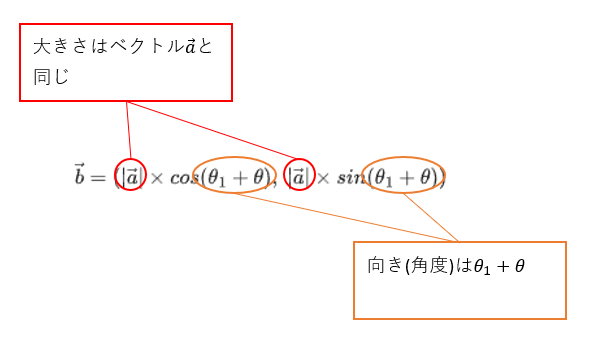
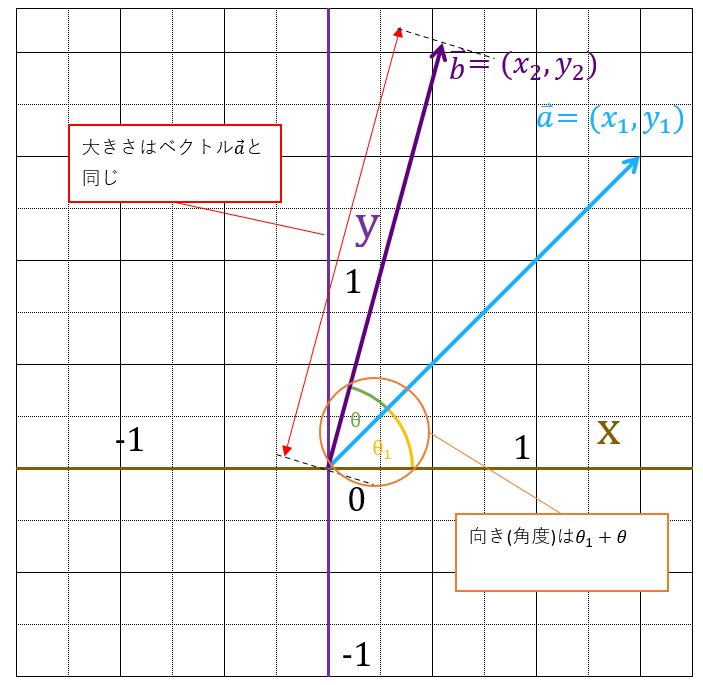
なので、実際に計算して、計算結果である$\boldsymbol{\vec{b}}$が、「$\boldsymbol{ (|\vec{a}|\times \cos(\theta_1 + \theta),\; |\vec{a}|\times \sin(\theta_1 + \theta))}$」となっていれば、$\boldsymbol{\vec{b}}$は、$\boldsymbol{\vec{a}}$をθ回転させたベクトルであると言えます。・・・・(1)
早速、実際に計算していきましょう。
まず、$\vec{a}$を事前に三角関数表示にしておきます。
$\vec{a}$を三角関数表示すると・・・
$\vec{a}= (x_1,\; y_1) = (|\vec{a}|\times cos\theta_1,\; |\vec{a}|\times sin\theta_1) $となります。
よって
$ \begin{bmatrix} x_1 \\ y_1 \end{bmatrix} = \begin{bmatrix} |\vec{a}|\times cos\theta_1 \\ |\vec{a}|\times sin\theta_1 \end{bmatrix} $が成り立つので、
$ R(\theta)\times\vec{a} = \begin{bmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{bmatrix} \times \begin{bmatrix} x_1 \\ y_1 \end{bmatrix} = \begin{bmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{bmatrix} \times \begin{bmatrix} |\vec{a}|\times cos\theta_1 \\ |\vec{a}|\times sin\theta_1 \end{bmatrix} $となります。
次に実際に計算してみます。
計算してみると、
$ \begin{bmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{bmatrix} \times \begin{bmatrix} |\vec{a}|\times\cos\theta_1 \\ |\vec{a}|\times\sin\theta_1 \end{bmatrix} = \begin{bmatrix} |\vec{a}|\times\cos\theta\cos\theta_1 – |\vec{a}|\times\sin\theta\sin\theta_1 \\ |\vec{a}|\times\sin\theta\cos\theta_1 + |\vec{a}|\times\cos\theta\sin\theta_1 \end{bmatrix} = \begin{bmatrix} |\vec{a}|\times(\cos\theta\cos\theta_1 – \sin\theta\sin\theta_1) \\ |\vec{a}|\times(\sin\theta\cos\theta_1 + \cos\theta\sin\theta_1) \end{bmatrix} $になります。
ここで、この箇所に注目します。
この箇所が、三角関数の加法定理の展開式になっています。
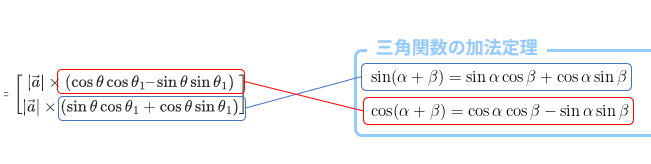
よって、加法定理より、以下が成り立ちます。
$ \begin{bmatrix} |\vec{a}|\times(\cos\theta\cos\theta_1 – \sin\theta\sin\theta_1) \\ |\vec{a}|\times(\sin\theta\cos\theta_1 + \cos\theta\sin\theta_1) \end{bmatrix} = \begin{bmatrix} |\vec{a}|\times\cos(\theta+\theta_1) \\ |\vec{a}|\times\sin(\theta+\theta_1) \end{bmatrix} $最後に計算結果をベクトルに戻してやります
$ \begin{bmatrix} |\vec{a}|\times\cos(\theta+\theta_1) \\ |\vec{a}|\times\sin(\theta+\theta_1) \end{bmatrix} = (|\vec{a}|\times cos(\theta_1 + \theta),\; |\vec{a}|\times sin(\theta_1 + \theta)) $
この回転行列の計算によって得られたベクトル$\boldsymbol{\vec{b}=(|\vec{a}|\times cos(\theta_1 + \theta),\; |\vec{a}|\times sin(\theta_1 + \theta))}$は(1)と一致しています。
よって、回転行列の計算によって得られる$\vec{b}$
$ R(\theta)\times\vec{a} =\vec{b} $は、$\vec{a}$をθ回転させたベクトルである。
証明終了